-
Basic Matrix Transformations:
- Scaling Matrix: Adjusts an object’s size along the x, y, and z axes.
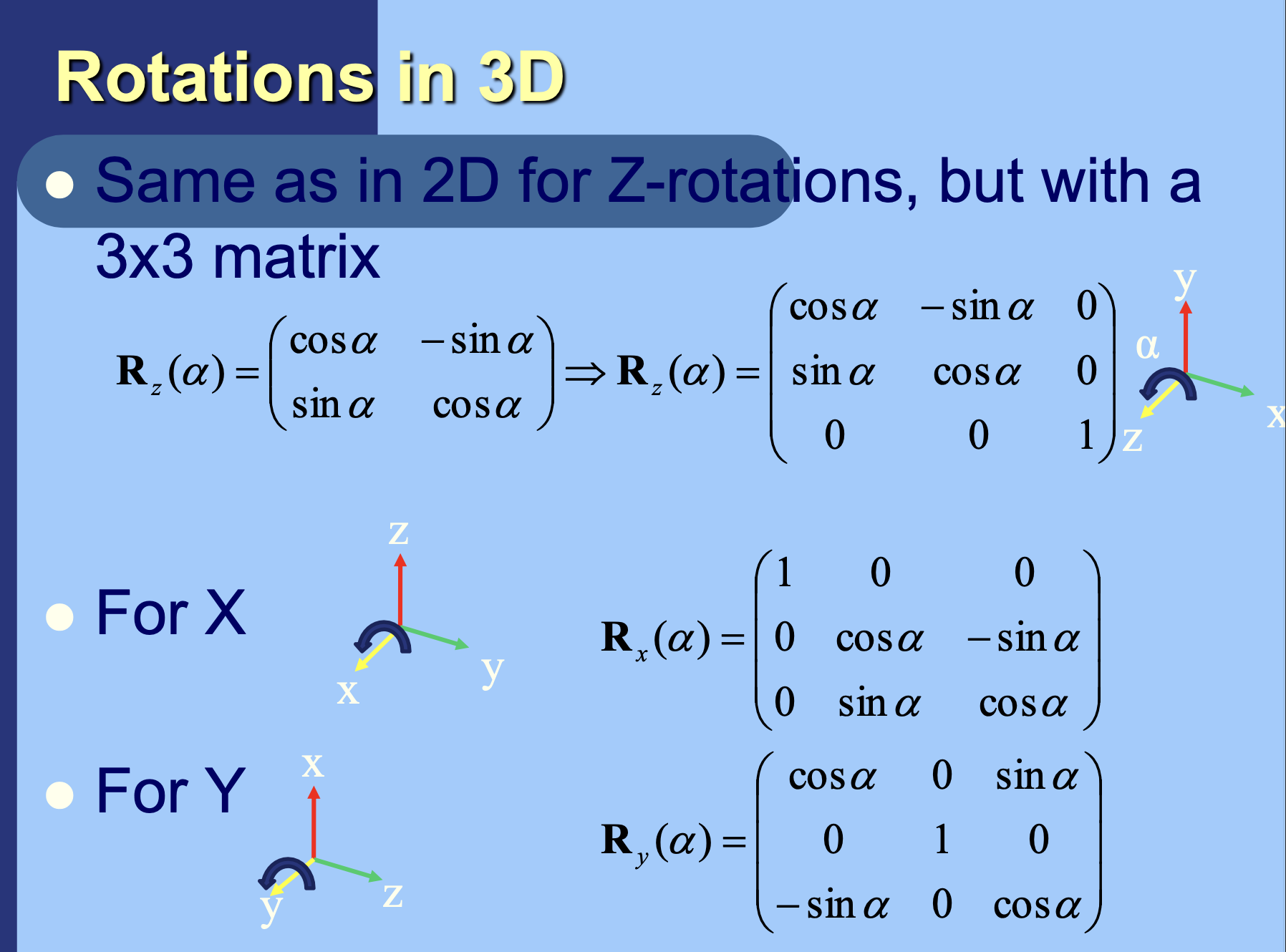
- Rotation Matrix: Rotates an object about an axis; can be around x, y, or z in 3D space.
- Translation Matrix: Moves an object to a new position without altering its orientation.
-
Change of Frames:
- Conversion from model coordinates to view coordinates requires a transformation matrix (Model-to-View Matrix).
- Model → World → View → Projection
- This matrix positions objects relative to the camera for rendering.
-
Quaternions:
- Used for representing rotations efficiently.
- Provides smooth interpolation between rotations (ideal for animations and orientation in 3D space).
- , and
-
Euler Transforms:
- Combinations of rotations about the x, y, and z axes (known as yaw, pitch, and roll) help represent complex orientations.
- Euler angles can lead to issues like “Gimbal lock,” where rotation becomes restricted along certain axes.
-
Line Drawing Algorithms:
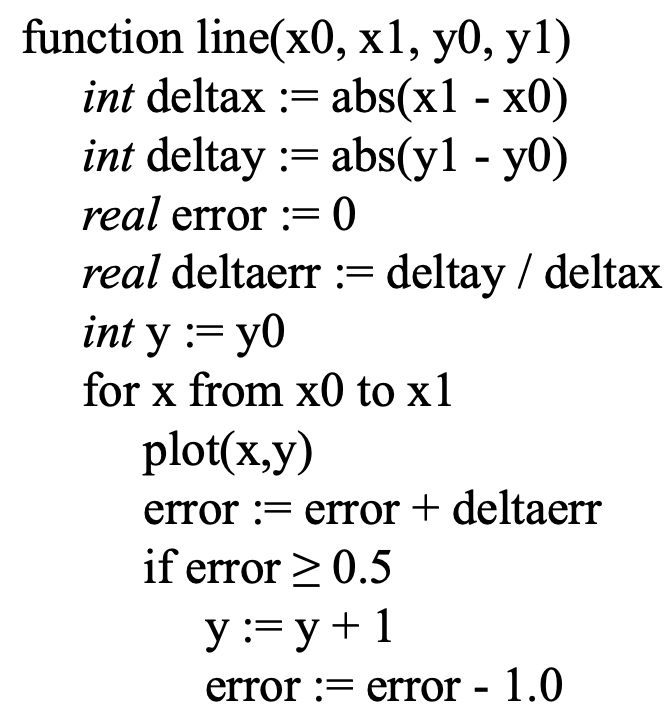
- Digital Differential Analyzer (DDA): Generates lines by incrementing x or y and calculating corresponding points.
- Bresenham’s Algorithm: An optimized line-drawing algorithm that uses integer calculations, making it faster and ideal for raster graphics.
- Digital Differential Analyzer (DDA): Generates lines by incrementing x or y and calculating corresponding points.
-
Pros and Cons of Bresenham’s Algorithm:
- Advantages: Integer-based and efficient, well-suited for real-time applications.
- Disadvantages: Works best with lines of gentle slopes and can require adaptation for steeper angles.